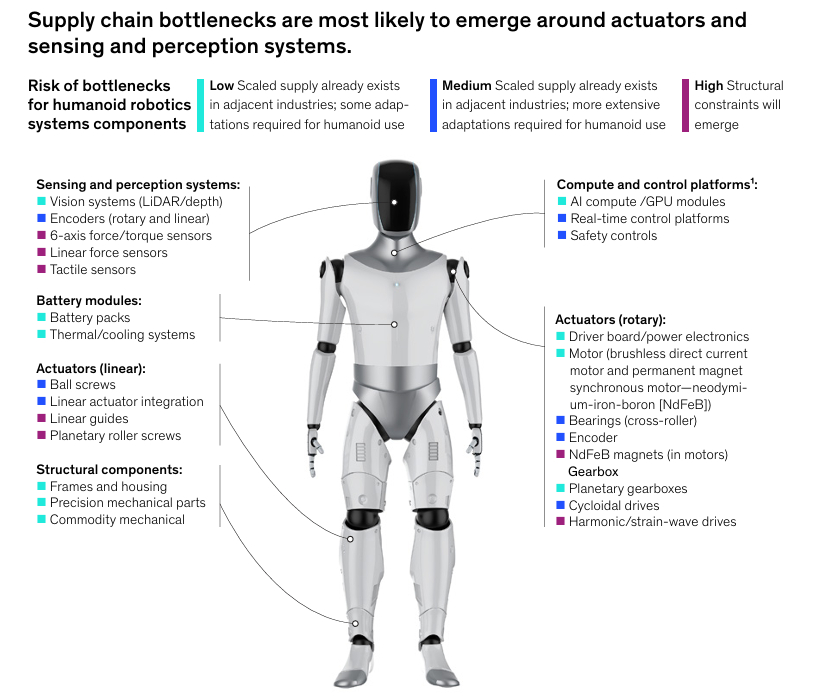
麦肯锡认为人形机器人所面对的供应风险来自多个维度,将其分为低、中、高三档。最值得关注的,是三类高风险环节:
第一,精密传动部件。谐波减速器(Harmonic Drive)和行星滚柱丝杠(Planetary roller screws)是两块“硬骨头”。谐波减速器的产能集中在日本 Harmonic Drive System Inc、Nabtesco 以及中国绿的谐波等少数厂商,这类器件依赖专用加工设备和计量体系,扩产周期长,无法像电子元件那样按季度快速放量。
行星滚柱丝杠更紧张,全球仅有 SKF 等少数高精度厂商深耕,属于典型的小众高门槛市场。随着整机厂追求更高负载能力、向旋转与直线混合驱动架构演进,滚柱丝杠的需求可能短期内超出供应能力。行业媒体报道显示,部分执行器订单的交付周期已拉长至 14 个月。
第二,关键材料供应。高扭矩密度执行器离不开钕铁硼永磁体(NdFeB),而这一资源的全球分布高度集中。这一点我们在前段时间的文章也曾重点分析过。麦肯锡引用数据指出,目前中国掌控全球约 69% 的稀土开采和 90% 的磁体加工产能,近期出口政策调整已在行业内引发波动。马斯克也曾公开表示,磁体供应紧张影响了 Optimus 的量产节奏。对任何计划规模化量产的西方整机厂而言,这是一条无法绕开的变量。
第三,高级传感器与算力控制的整合。六轴力/扭矩传感器依赖高度定制的标定流程,供应商如 ATI、OnRobot 等规模有限,难以享受汽车或消费电子的外溢红利。触觉传感器技术路线更加分散,主流架构尚未形成。
算力侧则呈现另一种复杂:英伟达 Jetson 系列、车规级 MCU、工业伺服控制器被拼接使用,但没有一款产品是专门为人形机器人的协调控制与安全一体化设计的。这类问题属于“系统级瓶颈”,并不是缺芯片,而是缺一套可认证、低延迟、能统管 20 至 40 个执行器的控制单元。(MIT科技评论)